医療用ロボット
プロジェクト
カテーテル治療では、技師の人手不足や重労働が課題となっていた。FUJIは超音波プローブを操作するエコーガイドサポートロボットの開発に着手。しかしプロジェクトメンバーは、産業用ロボットと医療用ロボットの思想の違いに戸惑うことになる。
-

開発センター
技術部西山 識
プロジェクトリーダー・開発
2000年入社 -

開発センター
技術部山下 泰弘
開発
1999年入社 -
開発センター
技術部石川 宗
開発
2018年入社

カテーテル治療の分野で、
医療用ロボット開発の
構想を練る。
長年培ってきた産業用ロボットの技術を別の領域で活かせないかと、FUJIは考えていた。一方、共同研究を行う医療機器メーカー・朝日インテックでも医療用ロボットの開発を検討しており、双方の思惑が一致する形で本プロジェクトは発足した。
まずは朝日インテックが得意とするカテーテル治療の分野で構想を練ることになる。カテーテル治療は、血管が狭窄や完全に閉塞してしまった患者に対する治療法のひとつだ。カテーテルと呼ばれる直径約2mm程度の細い管やそのカテーテルを病変部まで誘導するガイドワイヤーを手首や足の付け根から挿入し、狭くなってしまった血管を広げる。
治療においては血管とカテーテルの位置確認のためにX線が使用されるが、以前から放射線被ばくが問題視されていた。そこで近年は、超音波プローブを使用したエコーガイドが普及し始めている。エコーガイドの場合、技師が超音波プローブを患部に当て、その画像を医師が確認しながらカテーテルを操作する。画像がリアルタイムで見られるほか、同時に安全性も担保できるメリットがあった。
とはいえ、エコーガイドにも課題がないわけではない。超音波プローブを常に正確な位置に、一定の圧力で長時間当て続けるのは、技師にとって難度の高い重労働だった。また、人手不足もあって技師を確保できない医療施設も多い。そこに目をつけたプロジェクトチームは、技師の代わりに超音波プローブを操作するエコーガイドサポートロボットの開発に取り組むことにした。


技術者自らが現場に出向き、
顧客の生の声を聞く。
過去にFUJIが医療用ロボットを開発した事例はない。構想設計・システム設計・ハードウェア設計・安全設計を担当する山下は当初、カテーテル治療がどんなものなのかすらよくわかっていなかった。ロボットの設計以前に、まずは現場を知る必要がある。パートナー企業の朝日インテックを介し、カテーテル室を見学する機会を得た。
エコーガイドサポートロボットの導入を提案した際、医師からは思いのほか好意的な反応が返ってきた。心臓カテーテル治療では、指先の繊細な感覚が求められる。あくまでエコーガイドは補助的な役割だが、「ロボットなんか手術に使えるわけがない」と拒否反応を示されるのではないかと予想していた山下は、ほっと胸をなで下ろした。
しかしながら、FUJIに医療の知識がないのと同じように、医師にはロボットの知識がない。そこで山下は、ホームセンターで購入してきたパイプやプラスチックダンボールで簡易的な模型をつくり、医師とイメージの共有を図ることにした。また、人とロボットの協働が成功している事例をさまざまな資料やセミナーから集め、それを本プロジェクトの構想に盛り込んでいった。
FUJIでは技術者自らが現場に出向き、顧客の生の声を聞くケースが多い。コーポレートスローガンの「お客様に感動を!」には、オフィスに閉じこもって自分の頭の中だけで考えていても顧客の心は動かせない、という意味が込められていると、山下は考えている。


産業用ロボットと医療用ロボットの
根本的な思想の違いを痛感。
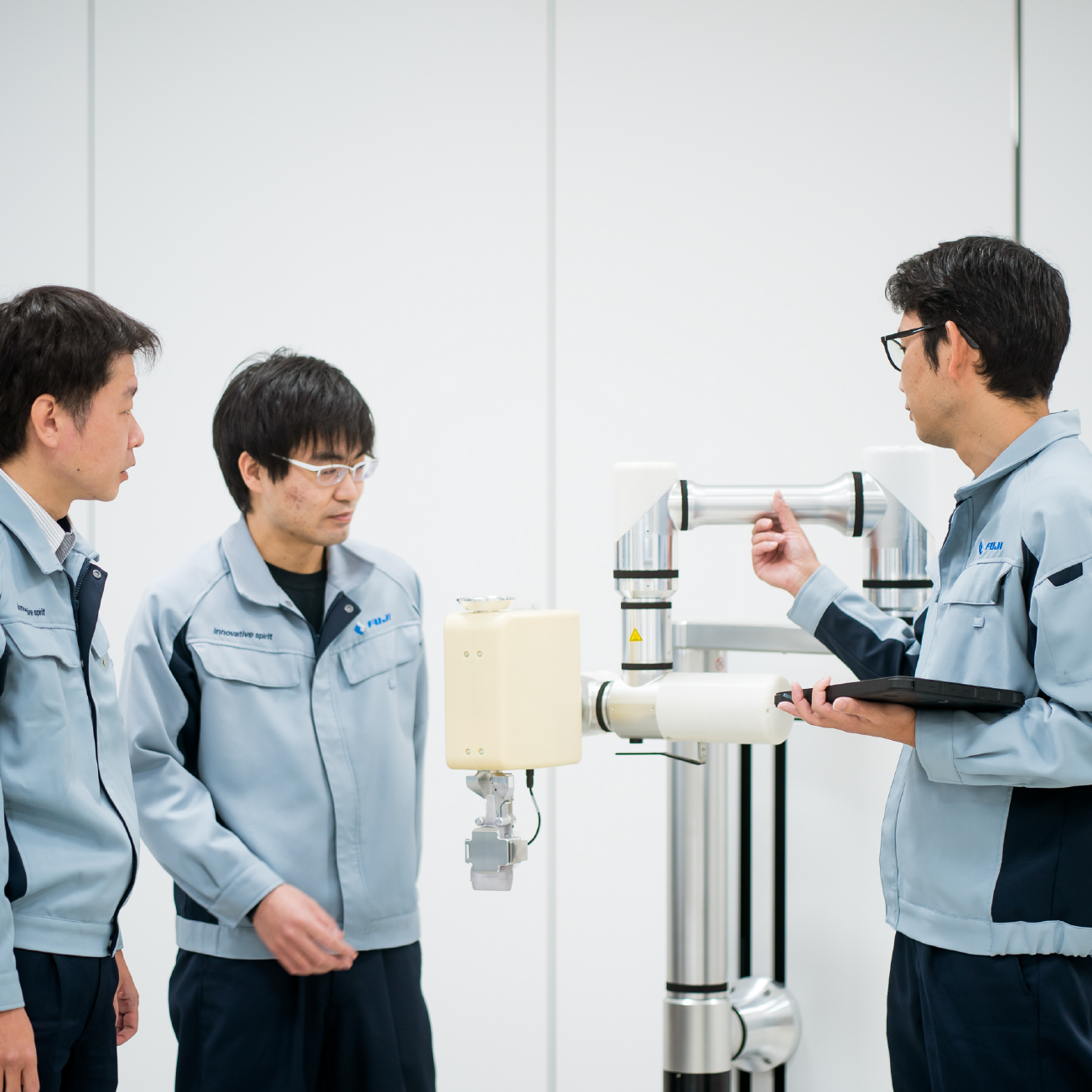
エコーガイドサポートロボットの試作品が完成し、実際に医師に使用してもらう運びとなった。プロジェクトリーダーを務める西山はそこで、産業用ロボットと医療用ロボットの根本的な思想の違いを痛感することになる。
電子部品実装ロボットなどの産業用ロボットは、製造の現場で使われている。工場では安全面を最優先し、指差し確認を行いながら作業を進めるのが一般的だ。当然、装置のタッチパネルでも確認ボタンを何度か押さなければならない。それをそのまま医療用ロボットに反映したところ、医師には「煩わしい」と映ってしまった。何度も何度も確認ボタンを押していてはスムーズに手術を行うことができない、という理由だ。また、エラーが発生した際、産業用ロボットは一旦停止が原則だが、医師としては手術の真っ最中に、“相棒”の医療用ロボットにフリーズされたら困る。多少の機械トラブルがあっても、確実に手術が続行できるように。医師の要望を汲み取りながら、システムを大幅に改変する必要があった。
また、ロボットを扱うのがほとんど初めてということもあり、それらの機能を数値や数字で言い表すのに慣れていない医師が多い。そのため「もっとアームがぐにゃぐにゃ動くようにしてほしい」といった非常に曖昧な要望を受ける結果になった。プロジェクトリーダーしてその情報をメンバーに展開する際、西山は感覚的な表現をどうデジタルにアウトプットしていくべきか頭を悩ませた。

安全性と操作性の両立に、
試行錯誤を重ねる。
検証担当の石川も、産業用ロボットと医療用ロボットの違いに苦慮していた。彼の役割は、開発したロボットが仕様通りにつくられているかの検証作業だ。検証中に発生した不具合に対する調査も実施する。また、山下や西山と同様、実際に手術の現場に足を運び、使用感などの意見を医師から収集。それを改善・改良に反映した。
特に難しいと感じられたのは、安全性と操作性の両立である。医師や患者の至近距離で動くロボットとして最低限必要な安全性、機械に不慣れ医師でも簡単にロボットを扱うことのできる操作性、それらのバランスをどう取るべきなのか、試行錯誤を重ねた。思いがけず医師に好評だったのが、超音波プローブの位置を微調整するコントローラだ。通常はタッチパネルかフットペダルで超音波プローブを操作する仕様になっており、コントローラはあくまで会議の際の話題づくり程度のオプションだった。ところが、特にゲームコントローラの扱いに慣れている若い医師に歓迎され、正式採用されることになった。
このプロジェクトは、今なお継続中でありゴールが明確に決まっているわけではない。正解が見えず、思い悩み、立ち止まってしまうこともある。しかしそんなときこそメンバーは「迷ったらユーザーの立場になって考える」という西山の言葉を意識する。これまでの自分たちの常識を決して押し付けず、使う医師のことを第一に思い開発する。医師に驚きと感動を与える医療用ロボットの実現に向けてさらに挑戦は続いていく。

プロジェクトの今後Future of the Project
超音波プローブを操作するエコーガイドサポートロボットは現在、3つの医療施設で試験的に導入されている。直近の目標は正式リリースであり、その先にある拡販なのだが、引き続きプロジェクトメンバーは医師の声を吸い上げ、性能の向上に努める。
「ロボットなんか手術に使えるわけがない」という現場の認識も明らかに変わりつつある。むしろ人の命に関わる手術だからこそ、ロボットの正確性や再現性がより強く求められるようになるかもしれない。FUJIとしては、エコーガイドサポートロボットを医療業界への本格参入の試金石と捉えている。まだ聞いたことのない声を求めて、今日もプロジェクトメンバーは現場へと向かう。